Behavior-Based Robotics: A Brief Overview
What is behavior-based robotics (BBR)?
- Mataric' Definition:
Behavior-based robotics (BBR) bridges the fields of artificial intelligence, engineering, and cognitive
science. The behavior-based approach is a methodology for designing autonomous agents and robots; it is a type of intelligent agent architecture. Architectures supply structure and impose constraints on the way robot control problems are
solved. The behavior-based methodology imposes a general, biologically inspired, bottom-up philosophy, allowing
for a certain freedom of interpretation. Its goal is to develop methods for
controlling artificial systems (usually physical robots, but also simulated
robots and other autonomous software agents) and to use
robotics to model and better understand biological systems (usually
animals, ranging from insects to humans).
- Take a look at Mataric' article in the
MIT Encyclopedia of Cognitive
Science at COGNET
(cognet.mit.edu/MITECS/).
What are behaviors?
- Again from Mataric:
Behavior-based robotics controllers consist of a
collection of behaviors that achieve and/or maintain goals. For
example, "avoid-obstacles" maintains the goal of preventing collisions;
"go-home" achieves the goal of reaching some home destination. Behaviors are
implemented as control laws (sometimes similar to
those used in control theory), either in software
or hardware, as a processing element or a procedure. Each behavior can take inputs from the robot"s sensors (e.g.,
camera, ultrasound, infrared, tactile) and/or from other behaviors in the
system, and send outputs to the robot"s effectors (e.g., wheels, grippers,
arm, speech) and/or to other behaviors. Thus, a behavior-based
controller is a structured network of interacting behaviors.
- Motivation: compare to "finite-state machines (FSMs)" (e.g., the 2nd to
last sentence in the above quote)
- many architectures are actually direct variants of FSMs (e.g.,
subsumption,situated automata, and others)
- Need to implement control components that achieve "behaviors" and arrange
them in a control system so that the transitions between behaviors occur
according to specification, i.e., need an "architecture"
- Lots of different architectures out there, can be characterized by an
"architecture schema"
Architectures
- In general, architectures specify an arrangement of components (or
functional units) and how they are connected
- Consequently, architectures define what is commonly called "virtual
machine" in CS (e.g., a non-physical, "software" machine with interacting
"software" parts)
- Main way to "carve up" architecture space: reactive vs.
deliberative architectures
- Or better: deliberative vs. non-deliberative as "reactive"
has different meanings to different people:
- reactive as "stateless"
- reactive as "(tight) sensor-motor coupling" (no intermediary
processing)
- reactive as "simple"
- reactive as "non-representational"
- reactive as "fast, timely response"
- Hence, be very careful when you read the term "reactive", it may not
mean what you think it means!
- One (strong) characterization of deliberative architectures:they
have components to perform "what-if" reasoning
- need to be able to entertain representations of non-existent states
(among other things)
- Also possible: hybrid architectures that combine reactive and
deliberative "sub-architectures"
- Other dimensions of architectural variation (Fig. 1.10 in the Arkin book
is only partially useful):
- Arrangement of components
- e.g., components arranged in a "hierarchy" (e.g., where components on
higher levels dominate components on lower levels)?
- Flow of control
- e.g., sequential activation of components (cp. the "Omega" model by
Albus, 1981)
- Self-modifying vs. non-selfmodifying architectures
- e.g., architectures with learning mechanisms
- Functional dependence on external factors vs. independent
functioning
- e.g., a chess program vs. controller of a machine (think of the
"thermostat" controlling the blinker)
- Functions of components vs. emergent functions
- e.g., "wall-following" implemented in a special components vs.
emergent from other the functioning of other components
- Behavior arbitration
- e.g., centralized arbiter that decides which "behavior to execute"
Expressing/describing behaviors
- Need to capture our behavioral descriptions
(e.g., formalize them)
- Different ways of capturing them:
- stimulus-response diagrams
- (mathematical) functional notation
- finite state machines
- formal methods (e.g., robotic schemas,
situated automata, JAVA programs, etc.)
Implementing "Behaviors"
How can we enocde/implement "behaviors"?
- Remember: stimulus-response diagrams denote
functions, i.e., mappings f(S)->R (where S is the domain of stimuli and R
the domain of responses)
- Hence, in general a behavior is such
any mapping from possible stimuli to possible responses
- What are possible stimuli?
- depends on sensors (e.g., pixel images in the
case of cameras, a frequency spectrum for microphones, etc.)
- In general: a stimulus can be taken to be a
tuple <p,lambda>, where p denotes a particular
perceptual class and lambda denotes the intensity of the stimulus
- What are the responses?
- depends on effectors or actuators (e.g.,
motors, wireless transmitters, etc.)
- often expressed in terms of strength
and orientation for motors (think of vectors!)
- In general: if a motor response involves
physical movement, then it can be characterized by a six-tuple
<x,y,z,theta,phi,psi> (three
translational and three rotational degrees of freedom-an unconstrained
rigid object has six DOFs)
- Distinguish: holonomic from
non-holonomic (a "non-holonomic constraint" is a limitation on the
allowable velocities of an object)
- For both stimuli and response, a notion of
"strength" has to be defined
- Issue: what is the magnitude?
- Interesting dichotomies:
- discrete vs. continuous (in time and/or
space)
- analog vs. digital
- simple vs. complex
- structured vs. unstructured
- First Mantra of reactive BBR:
the presence of a stimulus is necessary, but not
sufficient to evoke a motor response in a BB robot.
- Hence, need a threshold tau
What is a behavioral mapping?
- Formally for motors:
f:(p,lambda)-><x,y,z,theta,phi,psi>
(where
<x,y,z,theta,phi,psi>=<0,0,0,0,0,0>
if lambda<tau)
- In addition: gains (to modify response
strength, also used to "integrate behaviors", will talk about this later)
- e.g.,
<a,b,c,d,e,f><x,y,z,theta,phi,psi>
(g=<a,b,c,d,e,f> is a
vector of scalars that modify the respective components of the response
r, put more succinctly: r'=gr)
- Note: f can be any function
- However: often used functions are
- constant (e.g., "move at a constant speed)
- "binary" threshold (e.g., "stop when wall is
encountered")
- linear (e.g., "move faster the farther you
are away from a wall")
- combinations of the above (e.g., "move at a
constant speed while you cannot sense a wall, once you sense it slow down
proportional to the distance to the wall, and stop once you reached a
critical threshold")
- Distinguish: discrete vs. continuous
responses
- discrete responses categorizes the sensory
space into discrete categories and map a particular response to each domain
(as in the above examples)
- continuous responses do not categorize
the sensory space, rather they establish "correlations" (or more to the
point: functional dependencies) between stimuli and responses--force
metaphor
- Problem: how to integrate two or more
behavioral mappings? (no issue if we only have one, e.g., as for toy problem
one)
- Need to think of ways how to achieve this
integration, since most likely we will have different behaviors that the
robot should exhibit at different times
- Subsequent issues: action selection
and behavior arbitration
Assembling and Implementing "Behaviors"
Discrete vs. continuous encoding of behaviors
- What exactly is the difference?
- First cut: finitely vs. potentially
infinitely many responses
- Note: infinitely many behavioral responses
are only possible, if sensory space is also infinite (not very likely!)
- Second cut: granularity of response
- Compare: "moving forward" (for some time)
vs. "moving forward one yard" or "moving forward for 10 seconds at speed
1/10 yard/sec"
- Third cut: architectural representation of
response
- In the former case, there is component for
"moving forward" that may or may not give rise to the specific "moving
forward one yard" (given other components and their interactions), whereas
in the latter there is a particular component for "moving forward one
yard"
- Different ways of discrete encodings:
- Condition-action rules: IF
perception/condition THEN action ENDIF
- E.g., Nilsons teleo-reactive rules (e.g.,
"forward at speed s"--e.g., as opposed to "forward one yard")
- Goal-reduction rules (Gapps, situated
automata): ACHIEVE condition/action DO action ACHIEVE
action/condition ... ENDACHIEVE
- Brook's Behavior Language: WHENEVER
condition &rest body-forms)
- Most so-called "agent architectures" specify
a finite set of "possible actions" (e.g., dynamic logic and various
logics used to describe the temporal behavior of systems)
- An agent is usually construed as a function
F:(Inputs,States)->(Actions,States)
(FSM!)
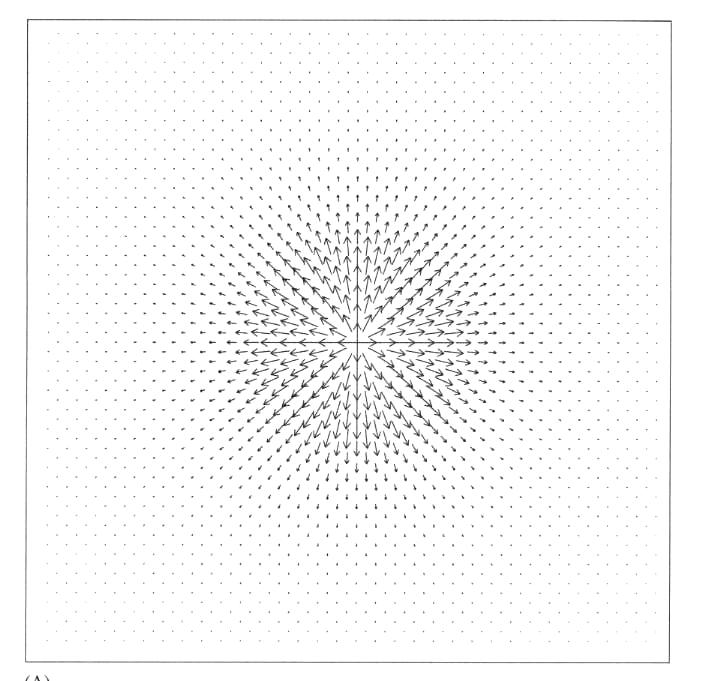
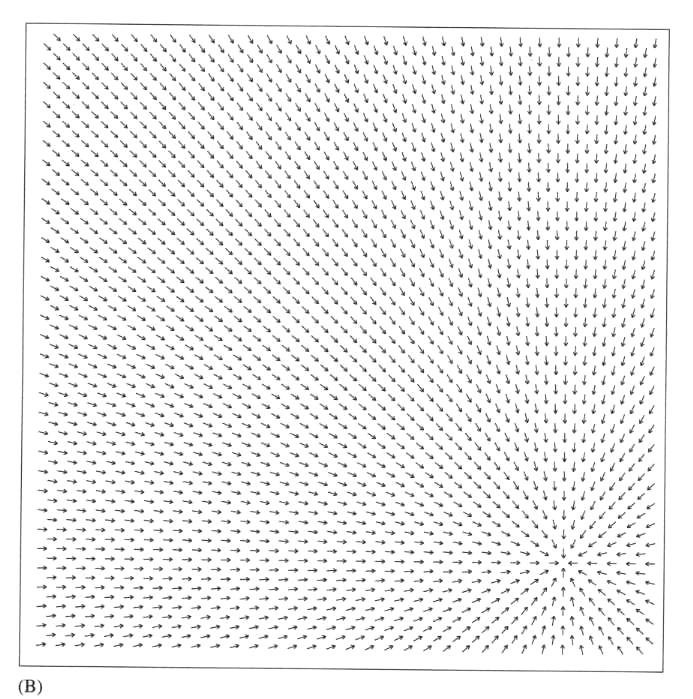
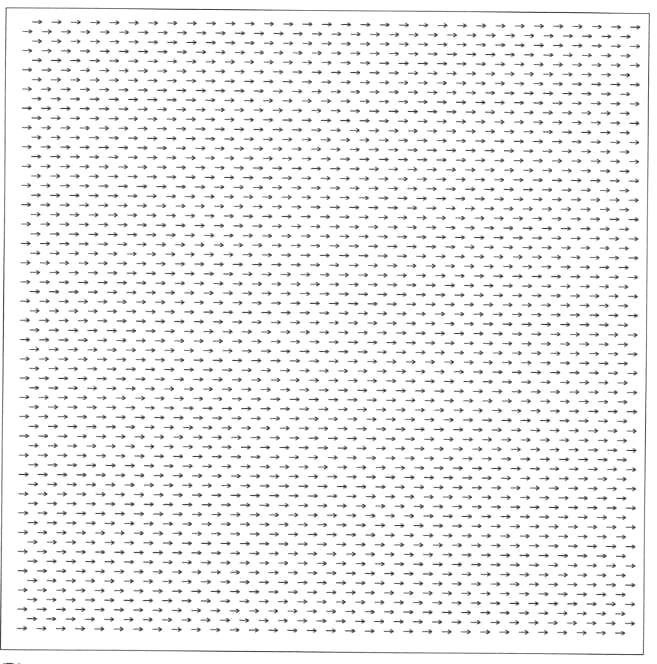
- Continuous encodings:
- Use continuous mapping from sensors to
motors, i.e., express relationship of what to do
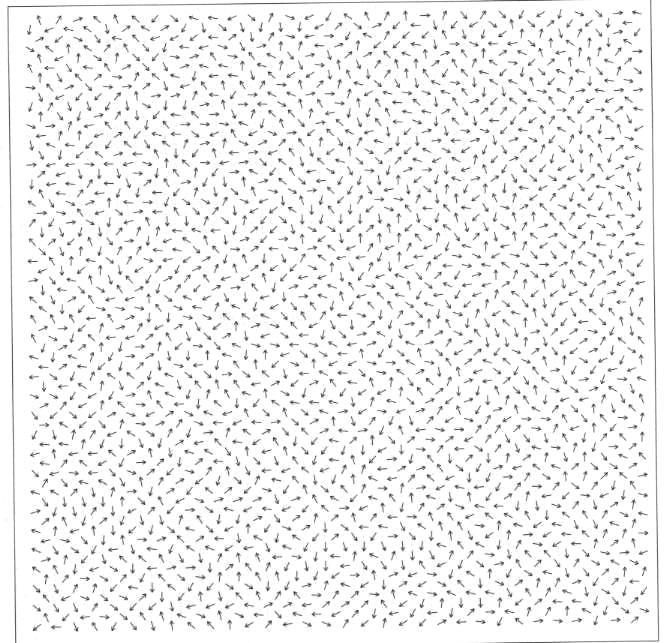
- Commonly used: vector fields
- Environment is construed as a vector space
where in each location a vector indicates the direction and strength of the
motor response (may have to do this for different motors)
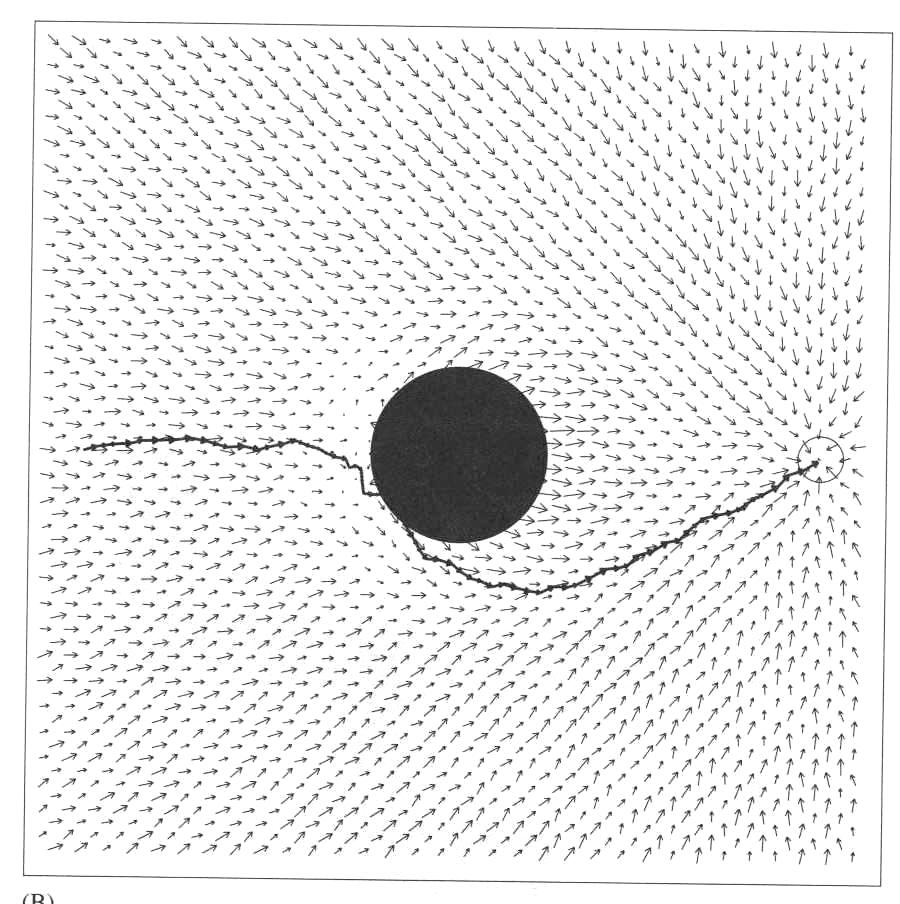
- Vectors are used as "forces", where forces
are usually related to distance in space by the "inverse-square law":
force = 1/(distance*distance)
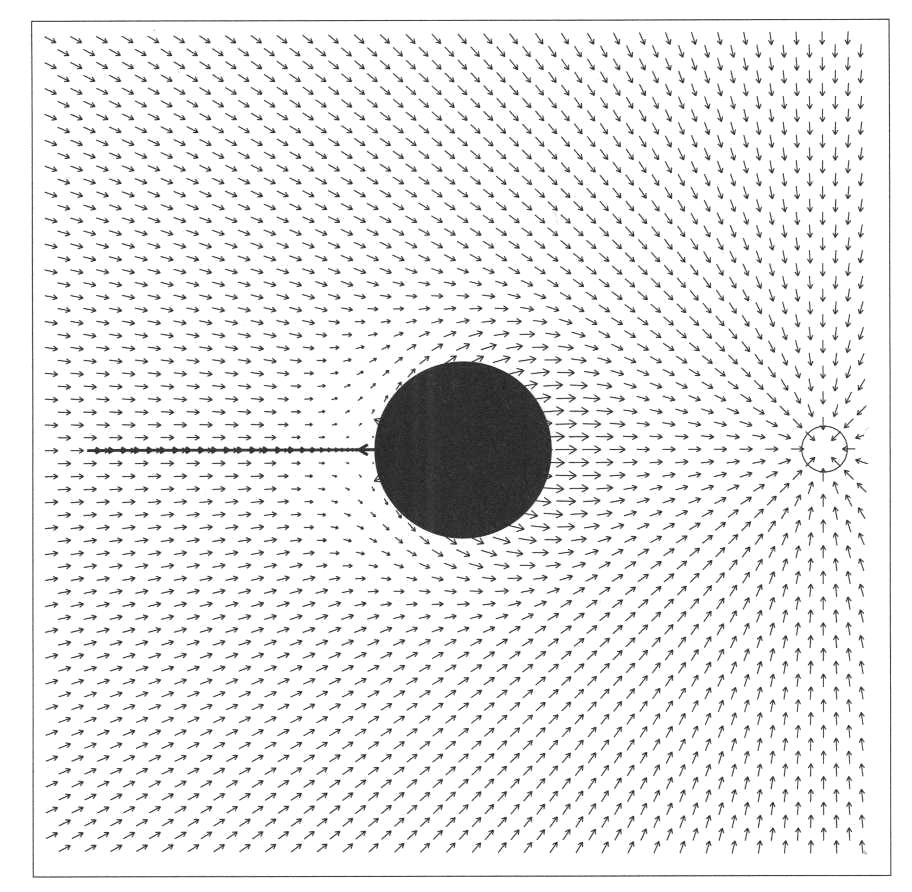
- Use: attractive and repulsive
forces to "classify" sensory stimuli (i.e., some stimuli will produce
attractive forces, others will produce repulsive forces)
Behavior coordination
- Need to integrate different behaviors to get
interesting system behavior
- Design issues:
- what is the overall behavior the system needs
to achieve
- how can it be broken down into components
- General case: given S (stimuli vector),
B (vector of all behavior functions), G (vector of gains
for each behavior), we get the response vector
R=G*B(S)
- Need to select one component of R, hence need a
"coordination" function C from vectors to scalars:
ro=C(R)
- C is also called "coordination
function (strategy)" or "action-selection function (mechanisms)"
- Different coordination/action-selection
methods:
- competitive
- priority-based arbitration (e.g., through
dominance hierarchies, where higher levels dominate or suppress lower
levels)
- winner-takes-it-all (e.g., the highest
activation of all behaviors gets exclusive control of the motors)
- direct competition (through excitation
and inhibition)
- voting for actions
- cooperative
- "field fusion" (remember: vector fields are
"additive")
- "desirability vectors" (e.g., try to find
action that maximizes the desirability values of the behaviors)
- Putting things together:
- parallel execution vs. sequencing of actions
- hierarchical vs. non-hierarchical
organization
- => architectures!
- Issue: emergence of behavior, very
tricky notion (often poorly presented and understood, for a good discussion,
see Wimsatt http://www.ageofsig.org/3M/archive/wimsatt.pdf)
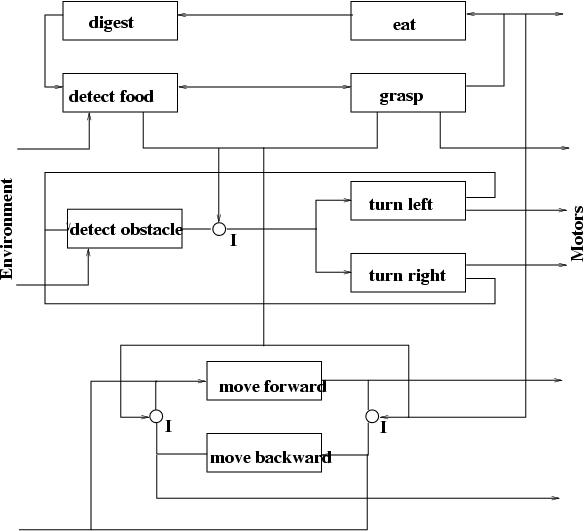
Architecture Example: Subsumption
- Developed by Rodney Brooks in the Mid-1980ies
- Comes with a whole "philosophy" about how to
design robots: strongly opposed to the "sense-plan-act" loop of classical
robotics (remember Shakey?)
- Core features:
- anti-representationalist - "the world is its
best model" (Brooks 1991)
- anti-"deliberatist" - "planning is just a way
of avoiding figuring out what to do next" (Brooks 1987)
- anti-realist with respect to intelligence -
"intelligence is in the eye of the beholder" (Brooks 1991)
- emphasizes control systems that are
- simple
- cheap
- robust
- autonomous
- parallel
- hierarchical
- incrementally extensible
- keywords:
- Basic component: augmented finite state
machine (AFSM)
- Why augmented? Because there are additional
control mechanisms (e.g., for timing, resetting)
- Inhibition, suppression and
reset links (to inhibit inputs, suppress and replace outputs of
AFSMs, as well as to reset them)
- Subsumption architectures then consist in an
arrangement of layers, each of which contains one or more AFSMs
- Difficult to specify interactions between AFSMs
- for easier use: behavior language
(abstraction over AFSM)
- Behavior coordination is competitive:
- layered dominance hierarchy of AFSMs (i.e.,
higher ones dominate lower ones)
- Arbitration mechanisms between layers may use
any of the three links
Architecture Example: Motor Schemas
- Arbib, Arkin, et al.
- Biologically inspired ("Schema theory", also:
motor control in insects)
- Reactive in nature (functional
sensory-motor mapping):
- uses force or potential fields to map sensory
space into motor space
- Cooperative behavior coordination (through
summation of fields!)
- Continuous response encoding
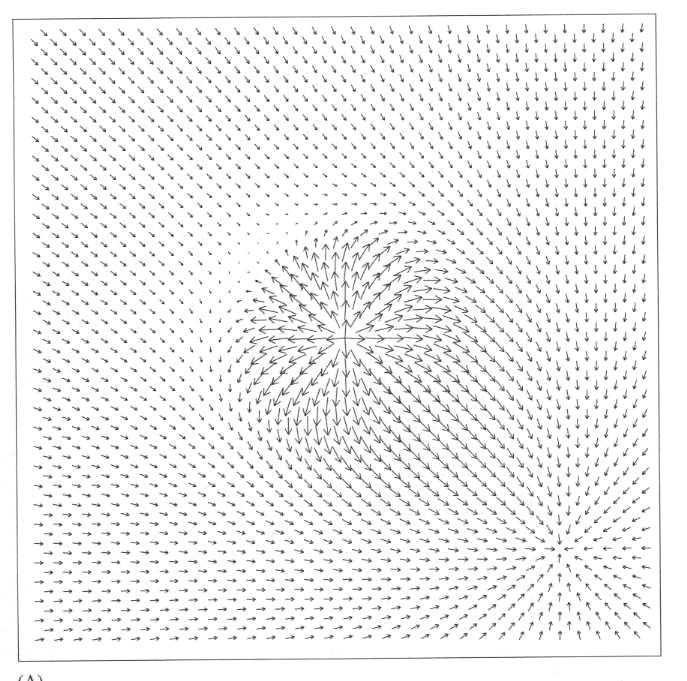
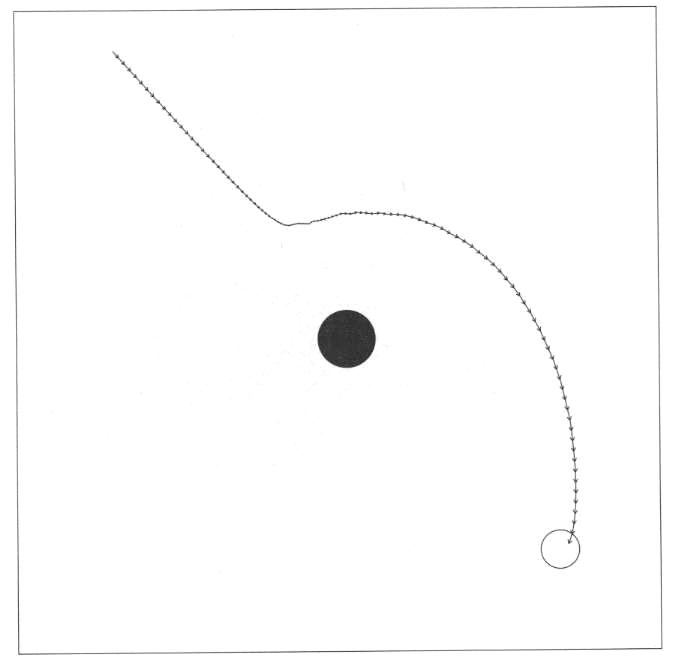
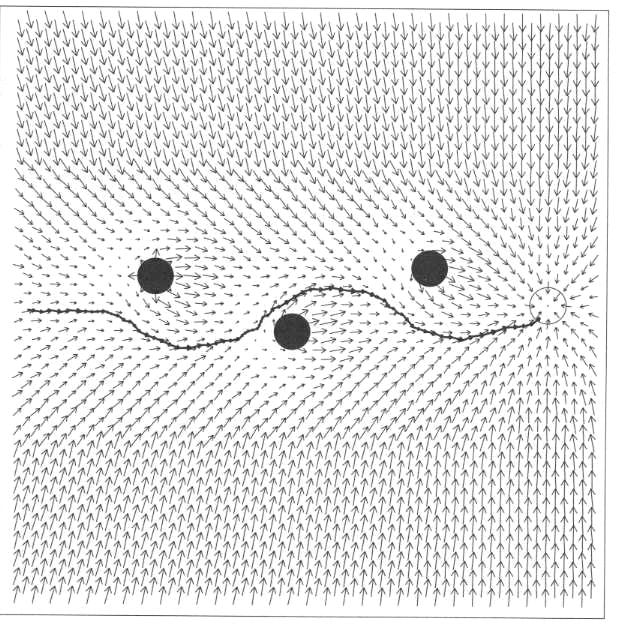
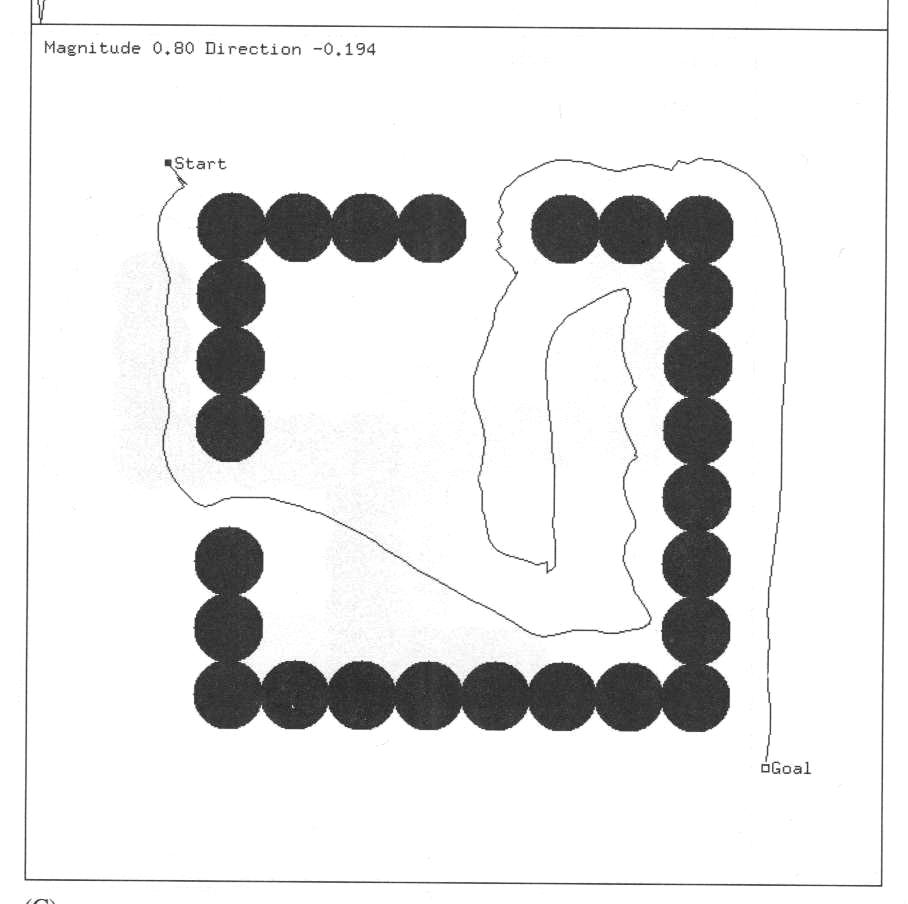
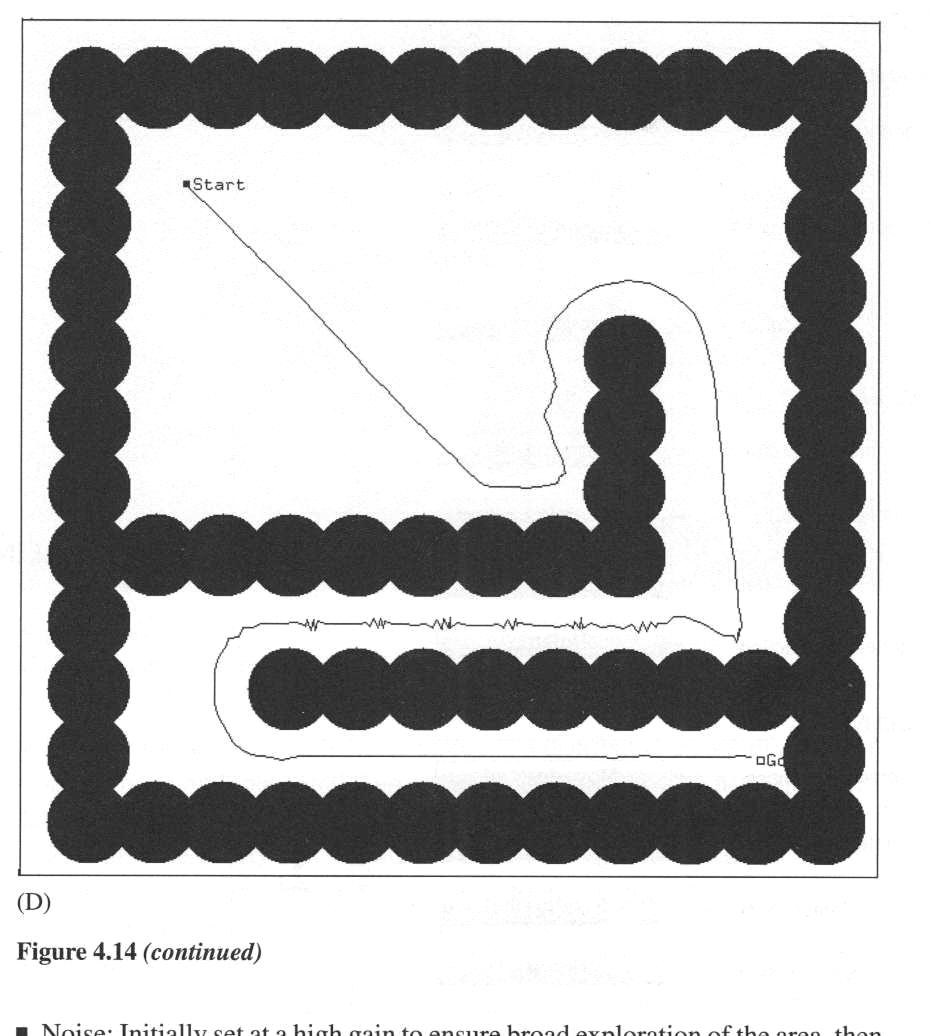
Examples of Fields and their Combinations
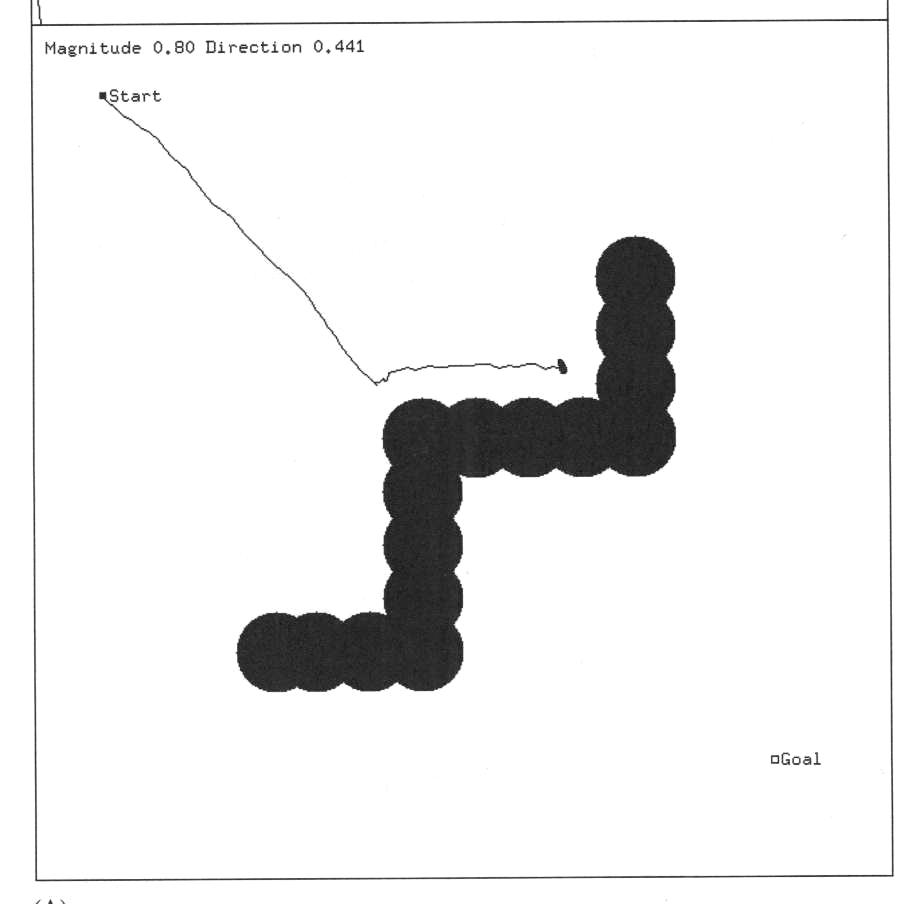
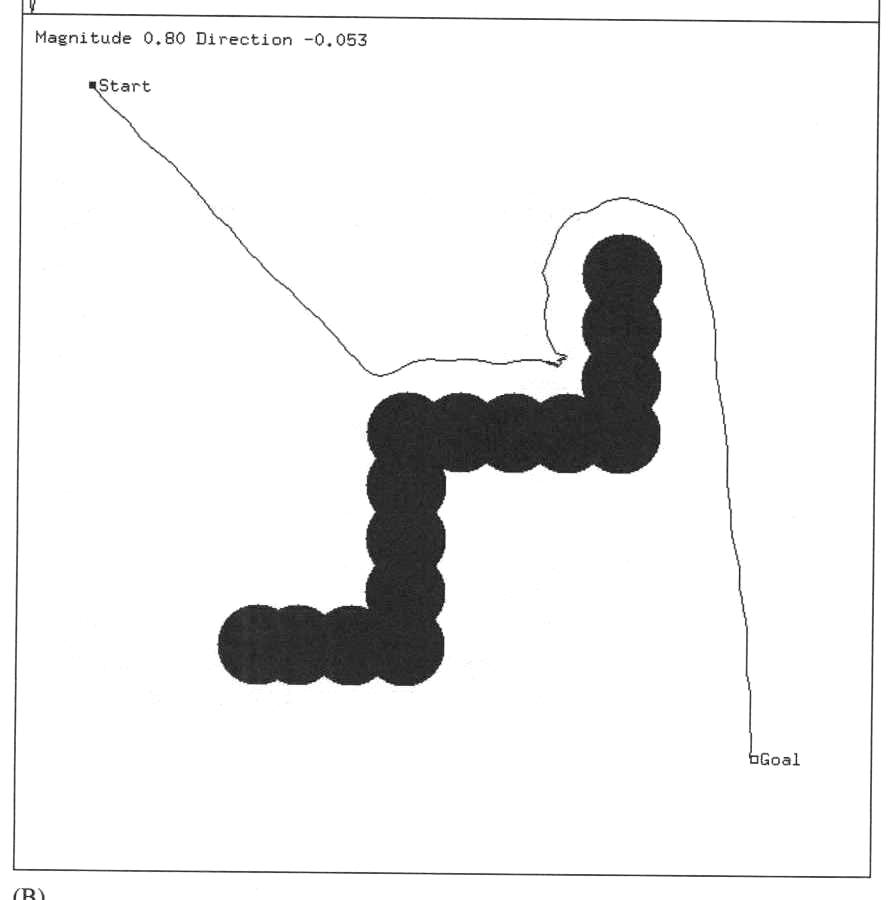
- Combination:
- Path taken by the agent:
- Corridor following:
- Issue: local minima
- Solution: add random noise!
- To get out of larger wells:
- Allows agents to traverse mazes, for example:
From Reactive to Deliberative Architectures
Extending Reactivity
- First, why do we need to extend it in the first place?
- Claim: every robot behavior can be implemented solely in reactive
behaviors--do you believe this?
- Because we want to improve the performance of the agent (i.e., add new
capacities), make it "smarter"
- In what directions can we/do we want to extend reactive behaviors?
- Remember: "avoid-past scheme", to keep track of past locations without
explicitly keeping track of environmental states
- Analysis: what exactly did we keep track off?
- Hence, one possible extension: explicitly allow for "internal states" to
keep track of environmental states-->memory!
- Distinguish: short term vs. long term memory
- More generally: allow for "internal states" to "stand in" for something
else-->representation!
- Careful: this is a very complex notion, lots of dispute in philosophy
alone about it (and different disciplines use the term "representation" in
very different ways)
- Also note: state /= representation
Representations
- Why representations?
- E.g., because they allow us to acquire knowledge and use reasoning
methods (e.g., to predict future developments or infer facts that cannot be
observed)
- What are other reasons?
- What is required for representation?
- Systematic correlation of a virtual machine state with another state
(either in the environment or within the agent)
- Why not "state in the architecture"?
- Note: maintaining such a correlation is not trivial--what is involved?
- What to represent?
- "Location" (of the agent or of a landmark in the environment)
- E.g., use "triangulation" from known landmarks to locate yourself or
other objects
- Prerequisite to making maps
- Evidence from biology that lots of animals are capable of
localization (using triangulation
- Also: animals use "cognitive maps"
- Distinguish: agent-centric coordinate system - world coordinate system
- In general: want to represent knowledge (about the world)--why?
- Remember the different kinds of "knowledge" we distinguished earlier?
- implicit vs. explicit
- positive vs. negative
- declarative vs. procedural
- innate vs. acquired
- direct vs. indirect
Maps
- Why are maps advantageous?
- Short term maps
- Improve perceptions (e.g., save recent sensory readings and use them to
constrain what could be "out there")
- Use for navigation or manipulations of objects
- Behavioral memory: keep track of sensor readings (in reasonably "stable"
environments), typically using "grid representations" of the space around
the agent
- Distinguish different kinds of grid representations:
- Long term maps
- Represent "knowledge" of environment
- Different encoding methods:
Summary
- Main extensions:
- short and long-term memory components (e.g., maps containing landmarks)
- representational capacities (e.g., of states in the environment, or
states of the agents itself such as "goals")
- why can it be advantageous to represent one's own goals?
- methods that operate on representations
- planning components (e.g., AuRA, Atlantis, Planner-Reactor, etc.)
- this is what most BB architectures have focussed on--why?
- reasoning components (e.g., BDI architectures, PRS, etc.)
- reflective components (e.g., probabilistic modal logics plus belief
nets, Koller et al.)
- Hybrid architectures (see section 6.6 in the Arkin book for a nice
overview)
- typically: reactive + deliberative
- better: reactive + non-reactive
- biological evidence: contention scheduling (Norman and Shallice, 1980,
Cooper and Shallice, 2000)
- often: layered ("layers of competence")
- layers may model time frames
- immediate: reactive
- short-term: action sequences
- long-term: deliberation (e.g., with explicit goal representations)
Case Study: Contention Scheduling
- Three layers:
- supervisory system
- schema layer
- schema network
- object network
- resource network
- low-level motor actions
- Influences:
- top-down excitation
- lateral inhibition
- self-influence
- external influence
- random
- Intended to model human action sequencing ("coffee making example")
Copyright © Matthias Scheutz,
2005